The Analytical Solution to the Inviscid Burger’s Equation¶
Author: Ruizhi Yu
The inviscid burger’s equation is a representative of the nonlinear hyperbolic partial differential equations (PDEs) with formula
We illustrate its solution using the initial condition
and boundary condition
The analytical solution can be derived using the method of characteristics.
First, rewrite the PDE as
Then the left hand side can be rewritten as the total derivative of \(u(x,t)\), that is,
Hence \(u\) is constant along the characteristics
Given \(u_0\) on \((x_0,0)\), we have, along the characteristic,
Therefore, any \(u(x,t)\) can be derived by first solving the equation
for \(x_0\) and then
Note
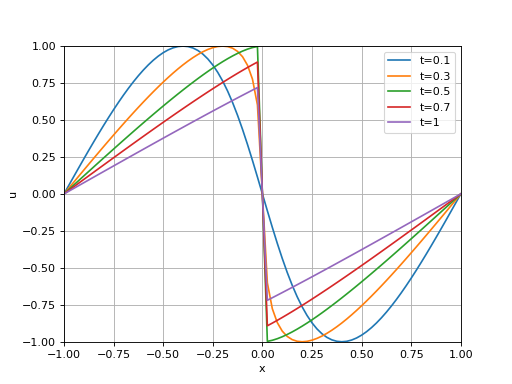
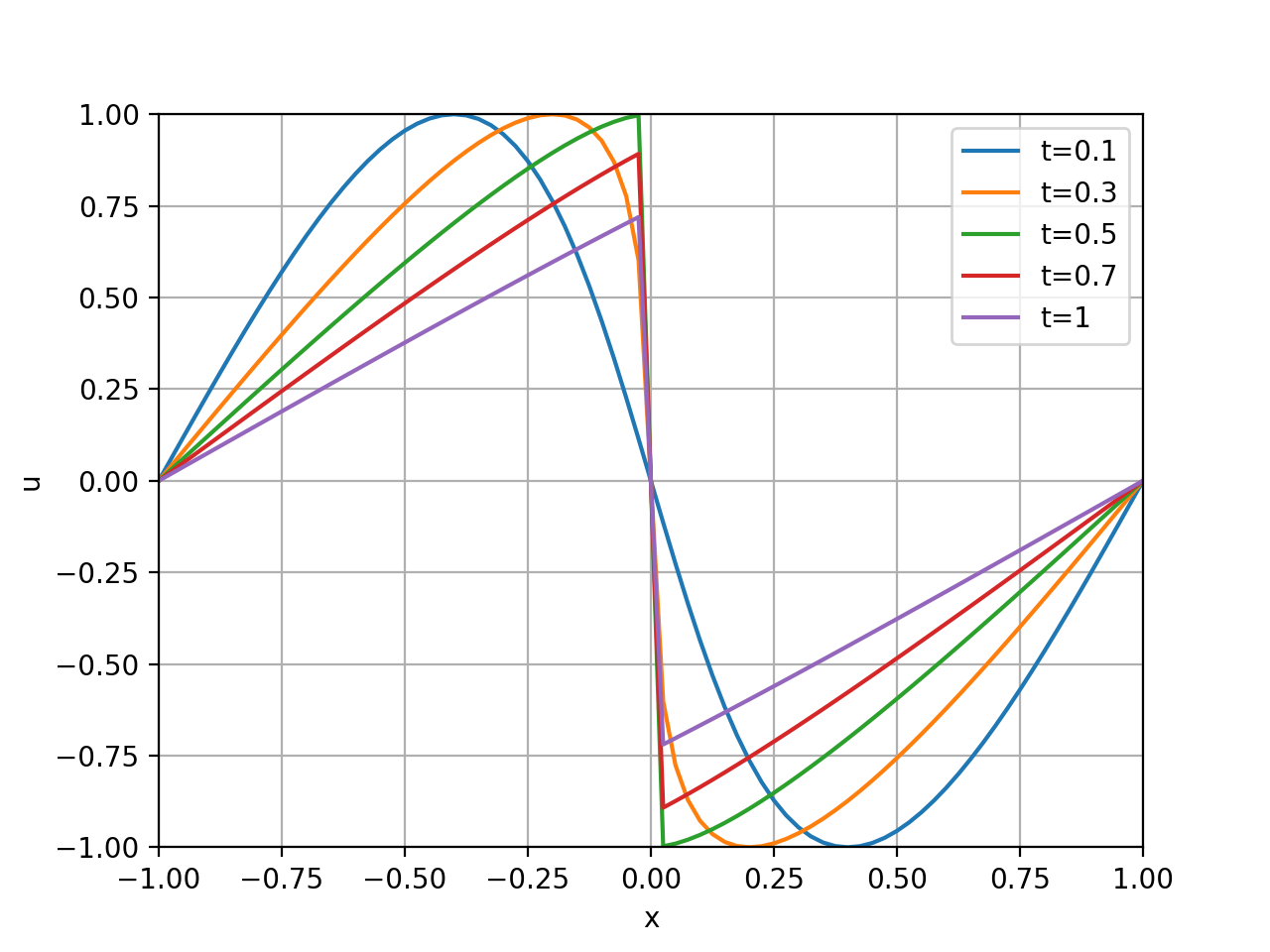
It should be noted that the solutions of nonlinear hyperbolic PDEs are typically spatially discontinuous.
In this example, a shock formulates at
and
since the initial condition is symmetric about \(x=0\).
The following codes illustrate the evolution of the shock.
import numpy as np
from Solverz import Var, Param, Eqn, made_numerical, sin, Model, nr_method, Opt
import matplotlib.pyplot as plt
# %% modelling
m = Model()
m.x = Var('x', 0)
m.t = Param('t', 0.3)
m.x1 = Param('x1', -0.1)
m.f = Eqn('f', m.x - sin(np.pi * m.x) * m.t - m.x1)
sae, y0 = m.create_instance()
ae, code = made_numerical(sae, y0, output_code=True, sparse=True)
# %% solution
opt = Opt(ite_tol=1e-8)
X = np.linspace(-1, 1, 81)
U = np.zeros((81, 5))
t_range = [0.1, 0.3, 0.5, 0.7, 1]
tshock = 0.31831
for j in range(5):
ae.p['t'] = t_range[j]
for i in range(X.shape[0]):
ae.p['x1'] = X[i]
if t_range[j] < tshock:
y0['x'] = X[i] # initial guess for Newton
sol = nr_method(ae, y0, opt)
U[i, j] = -np.sin(np.pi * sol.y['x'])[0]
else:
if X[i] > 0:
y0['x'] = 1
sol = nr_method(ae, y0, opt)
U[i, j] = -np.sin(np.pi * sol.y['x'])[0]
elif X[i] < 0:
y0['x'] = -1
sol = nr_method(ae, y0, opt)
U[i, j] = -np.sin(np.pi * sol.y['x'])[0]
else:
U[i, j] = 0
# %% visualize
plt.plot(X, U, label=[f"t={arg}" for arg in t_range])
plt.xlabel('x')
plt.ylabel('u')
plt.xlim([-1, 1])
plt.ylim([-1, 1])
plt.legend()
plt.grid()
plt.show()
Finally, we have
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}
